





Sensors
WARA-PS provides access to a variety of sensors for data collections and tests. These include NRTK GPS for positioning, LIDAR, RADAR and cameras to be mounted on agents or used on their own.


OUR TEST PLATFORMS
Mini-USV
The Mini-USV is available for integration and early tests, mainly directed towards researchers in the arena who want to integrate their research results with hardware. There are multiple Mini-USV’s available, meaning that they can be used for research in swarm robotics and swarm control. Each unit has a Raspberry Pi, thus making them programmable using Python. The Mini-USVs are MQTT-agents but can easily be configured to ROS2.

OUR TEST PLATFORMS
Mini-UAV
The Mini-UAVs are built upon the same autonomous system hardware as the Mini-USVs where a Pixhawk is used for remote and autonomous control and a Raspberry Pi is the companion computer, responsible for communication and high-level functions such as Core System integration and video feed. The navigation system is guided by two GNSS systems, one normal and one RTK (Real Time Kinetic), both from uBlox. The Mini-UAV’s are built using Holybro S500 V2 kits that have been adapted for use in the arena.
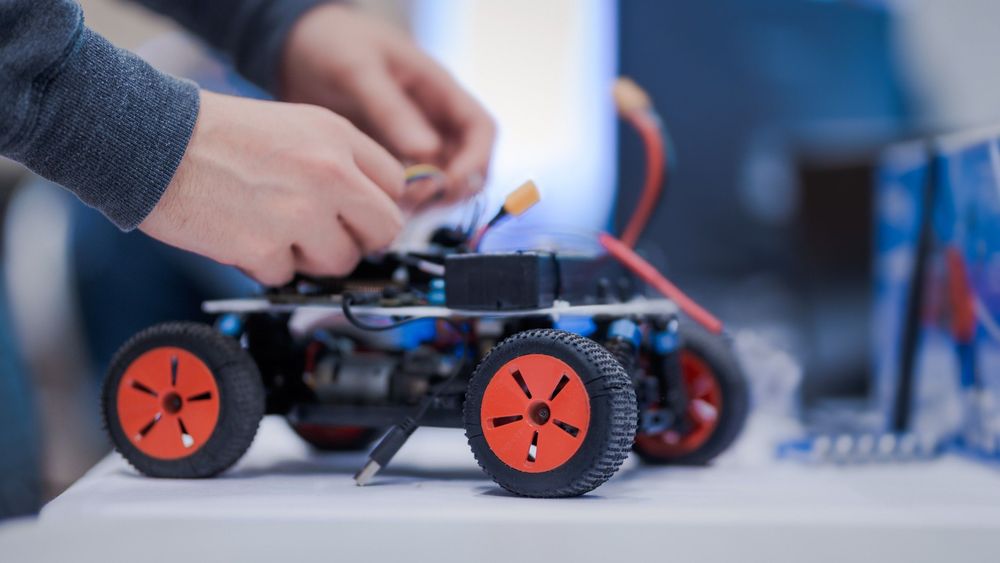
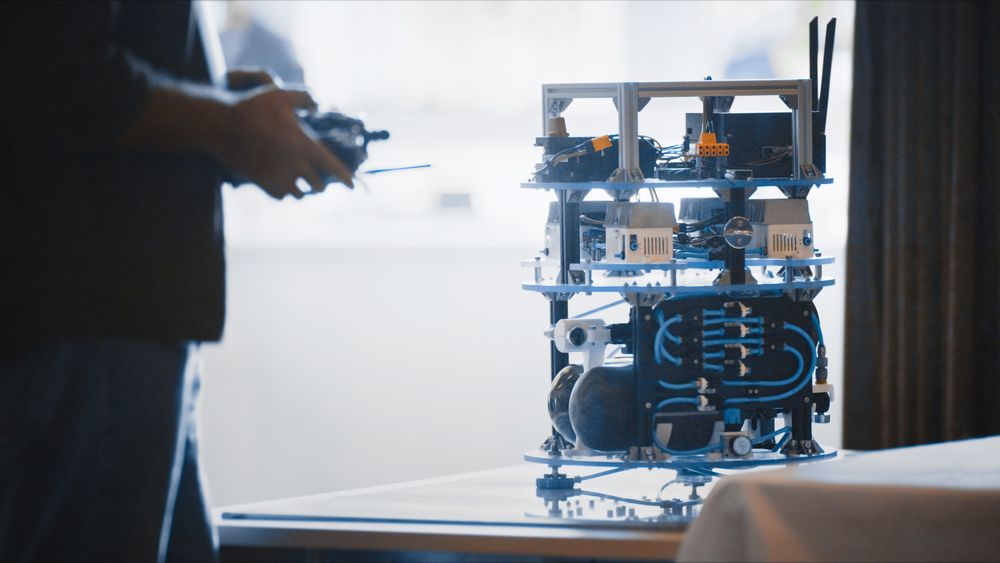
OUR TEST PLATFORMS
Mini-UGV
As with the Mini-UAV, the Mini-UGV is based on Pixhawk and a Raspberry Pi, with two GNSS systems for navigation. It is prepared as an MQTT agent with docker support connected to the Core System. The platform has been used as a moveable landing pad for drones, ground truth position for camera object detection as well as tracking.
